滑模模糊控制
的有关信息介绍如下: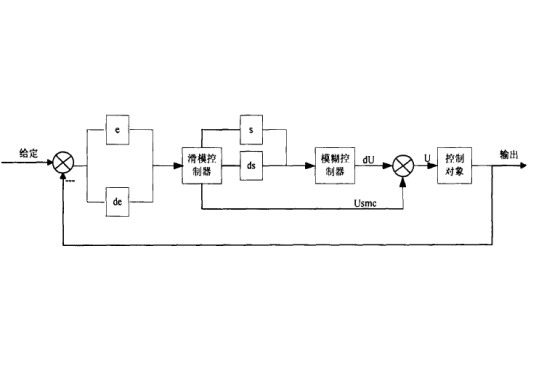
模糊滑模控制(FSMC)是一种将模糊控制和滑模控制相结合的控制方法;它是在不确定环境下,对于复杂对象进行有效控制的一种智能控制方法。它不依赖系统的模型,而且对干扰具有完全的鲁棒性,同时保持了模糊控制和滑模控制的优点。
模糊滑模控制的基本设计方法是在滑模控制系统的趋近阶段通过模糊逻辑调节控制作用来补偿未建模动力学的影响,其目的是提高控制系统的品质、减少到达滑动面时间、降低抖振。
想要了解更多“滑模模糊控制”的信息,请点击:滑模模糊控制百科
模糊滑模控制(FSMC)是一种将模糊控制和滑模控制相结合的控制方法;它是在不确定环境下,对于复杂对象进行有效控制的一种智能控制方法。它不依赖系统的模型,而且对干扰具有完全的鲁棒性,同时保持了模糊控制和滑模控制的优点。
模糊滑模控制的基本设计方法是在滑模控制系统的趋近阶段通过模糊逻辑调节控制作用来补偿未建模动力学的影响,其目的是提高控制系统的品质、减少到达滑动面时间、降低抖振。
想要了解更多“滑模模糊控制”的信息,请点击:滑模模糊控制百科


